面向无系留软体机器人的便携式可编程泵阀气动系统
所属领域:机械电子
研究目的:攻克传统气动系统体积庞大、笨重、难以集成的问题,为无系留气动软体机器人开发一种小型化、轻量化、具备独立正负压编程能力的高性能动力源。
目前开发阶段:样机测试成功
成果简介:
本成果是一款自主研发的高集成度便携式气动系统,旨在为软体机器人提供脱离外部气源和线缆束缚的“背包式”动力解决方案。
传统气动软体机器人依赖外接的空压机、真空发生器和大量阀件,导致系统冗杂、移动性差。本研究创新性地提出了一种基于并联扩展架构的核心设计,仅使用1个微型隔膜泵和12个微型电磁阀,即实现了5路独立气道的正负压力精确编程与控制,极大减少了元器件数量与系统体积。系统融合了闭环压力反馈控制算法,能动态调节输出压力,具备优异的抗干扰能力和阶跃响应速度,输出压力范围可达-63 kPa至+102 kPa。
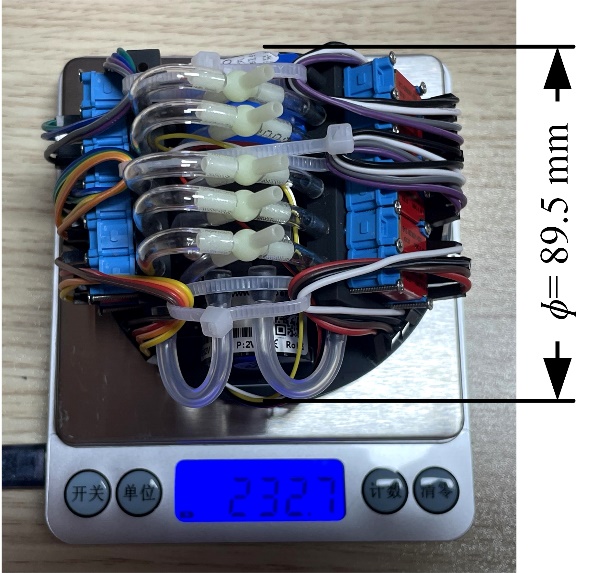
经测试,该样机重量仅232.7克,如图5所示,直径88.5毫米,额定功率4瓦,单次充电可持续工作约1.7小时。其支持充气、排气、保压、卸压及慢速脉冲等多种工作模式,可通过无线通信接收指令,灵活适配机器人的各种运动步态。
此外,本研究还通过异形PCB电路板设计(图6)和3D打印气路汇流排,实现了泵、阀、传感器、控制单元和电源的高度一体化集成,结构紧凑,可靠性高。